Weiss Robotics
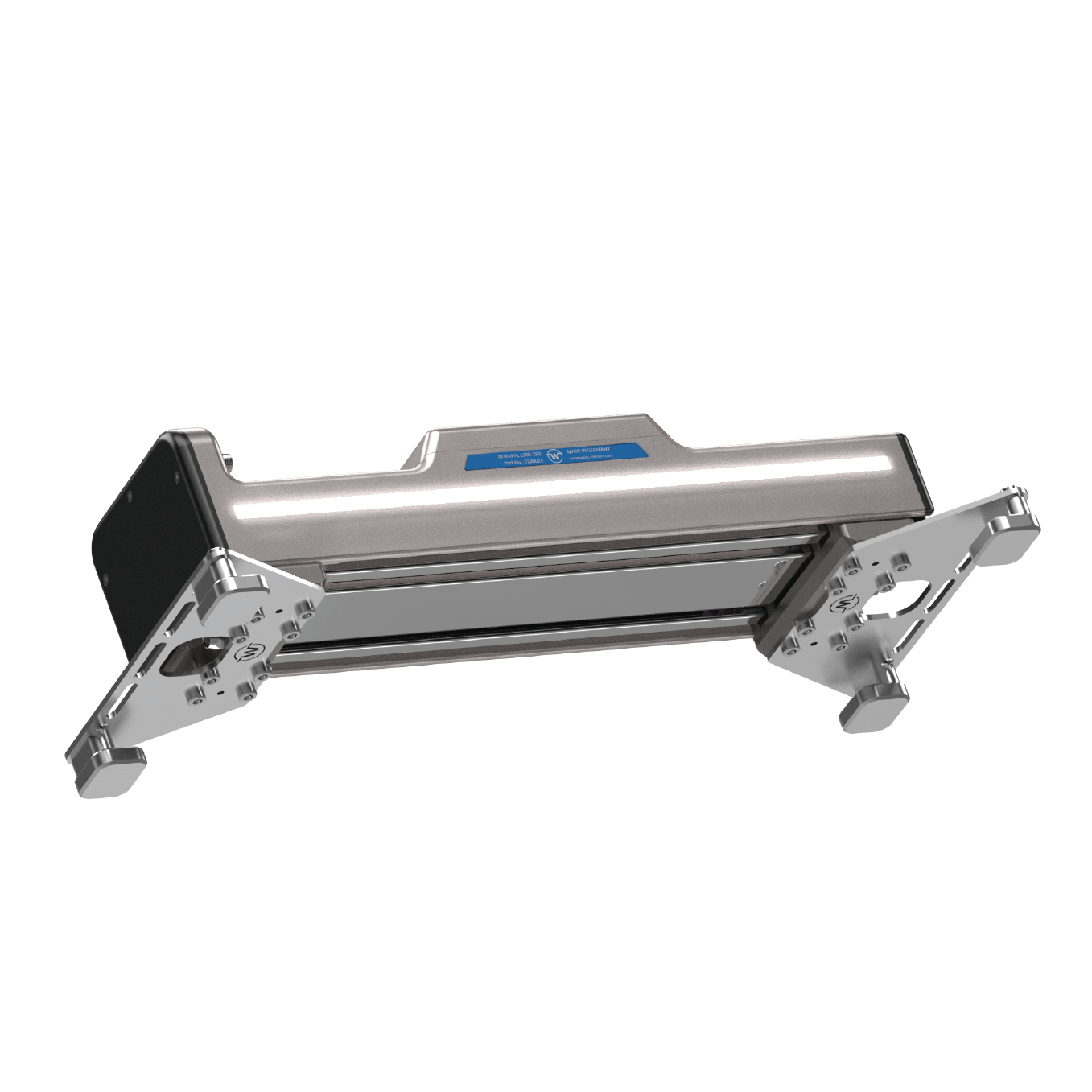
INTRAPAL 1200 - 280
Servo-electric gripping module for intralogistics with single-sided parallel kinematics, sensorless gripping force control, integrated grip part detection and monitoring, freely pre-positionable fingers, adjustable gripping force from 150–1200 N, stroke 0–280 mm, Ethernet interface (GRIPLINK-compatible), MODBUS RTU (optional), web server, and ESD dissipative design.
 High payload, excellent dynamics in a compact design
High payload, excellent dynamics in a compact design
- Versatile for industrial robots and cobots
- Easy setup with certified plugins
- Optional tool-I/O connection eliminates external cabling
- Already integrated on our Delta cobots

Target Audience
- Plant engineering, integrators, and end users from industry and trades
Use Case
- Automated palletizing of cartons, crates, and complex parts
- Empty container picking