How do I configure DRAStudio to collect information about the robot’s current status?
1. Connect DRAStudio with the robot > Select
I/O on the left sidebar > Select
Monitor Address
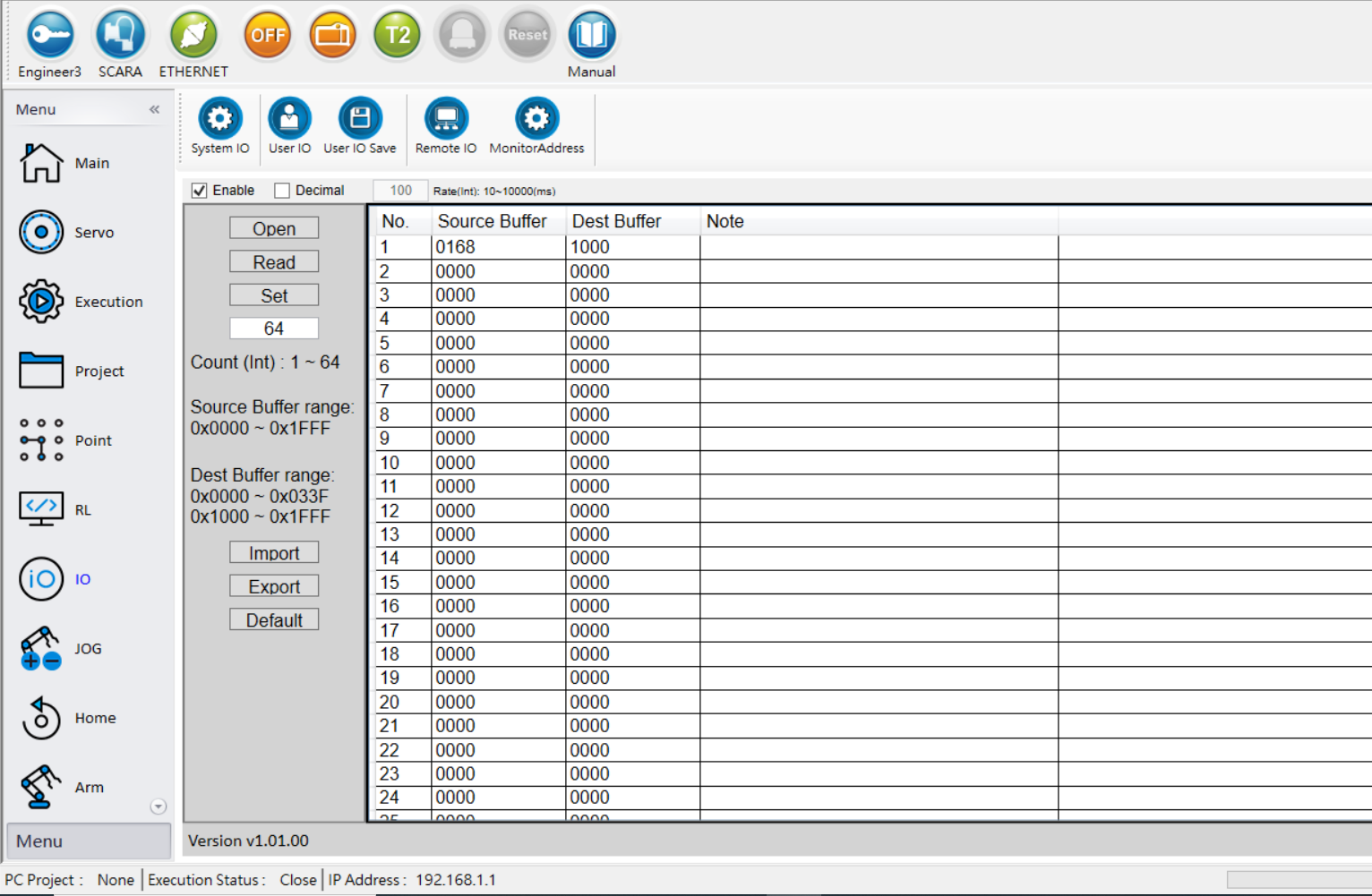
2. In
Monitor Address, add the addresses for mapping: Fill in the
Source Buffer (0x0168: J1 degree position),
Dest Buffer (0x1000), and set the scan time (
Rate). Select
Enable > Click on
Set to save the settings.
*For details of addresses corresponding to the robot status, please visit the DRAStudio installation folder > Manual folder > Modbus Address excel file.
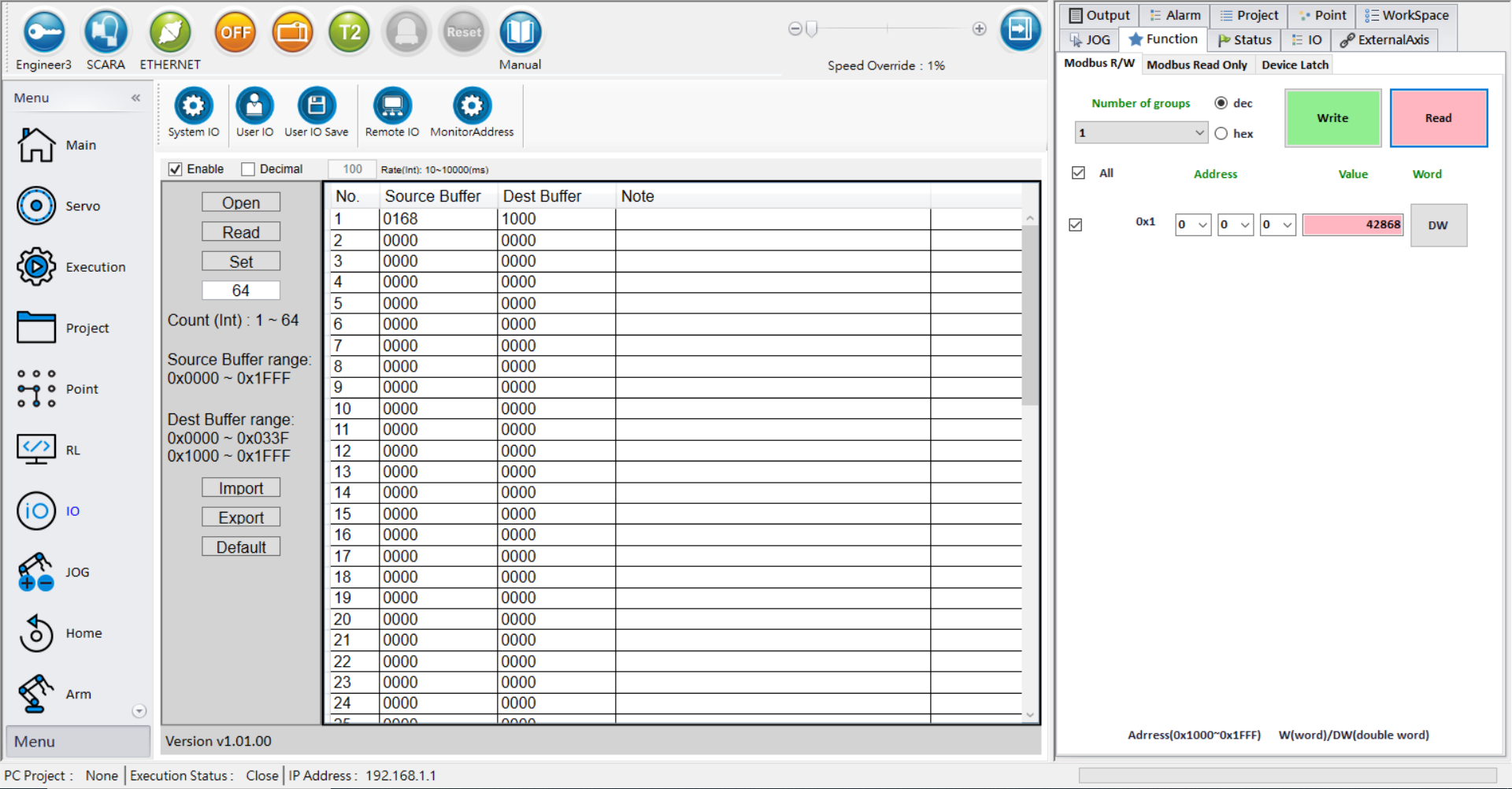
3. Click on
Function on the right sidebar to monitor the target position (0x1000) and obtain J1’s current position.